






PiezoRobotics压电式力传感器
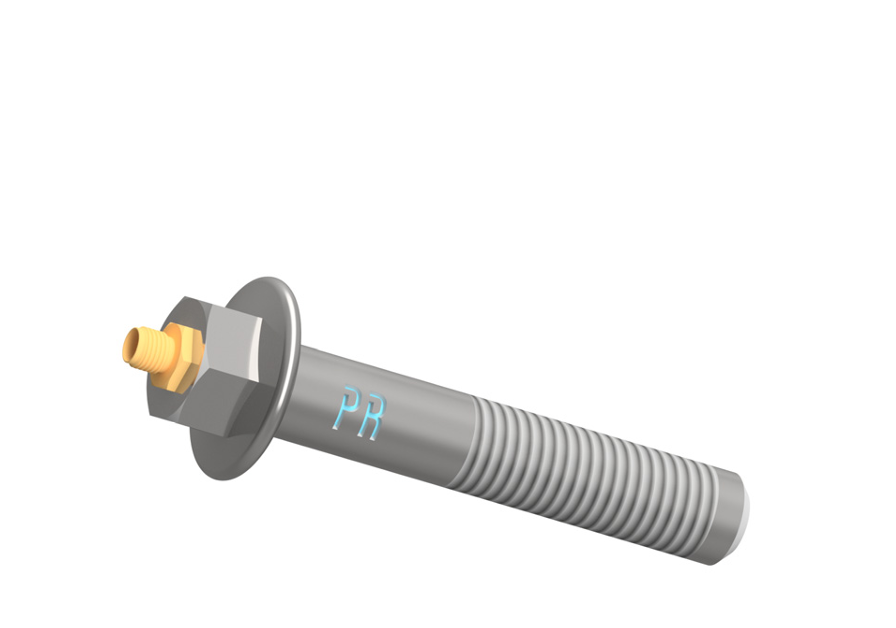
The PiezoRobotics的 pr.Bolt 是一个机械紧固件,集成了压电传感器,用于测量轴向动态力。
The PiezoRobotics的 pr.Bolt 是一个机械紧固件,集成了压电传感器,用于测量轴向动态力。
The PiezoRobotics的 pr.Bolt 是一个机械紧固件,集成了压电传感器,用于测量轴向动态力。它是下 一代高度精que和高度敏感的力传感器,从简单的应变式称重传感器发展而来,受益于更强大的电子装置和连接。
通过使用提供的信号调节器,pr.Bolt通过压电材料将输入的动态机械力转换为模拟 电压信号,在需要动态力测量的应用中非常有用。
主要特点
• 集成的压电式力传感器
• 拉伸和压缩的轴向力测量
• 低电压输出信号
• 宽带频率响应
应用
振动监测,结构健康监测,载荷数据采集,振动隔离,主动振动控制,过程控制和自动化。
电气连接
pr.Bolt信号调节器使用一个3.5x1.3mm直流插头,在5 VDC USB电源线上供电。
来自pr.Bolt的电缆被连 接到输入通道(10-32 UNF to BNC). 信号调节器的模拟输出信号可以通过BNC电缆连接到ADC或数据 采集系统。
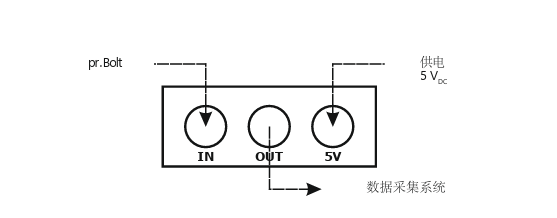
图 1. 供电和信号输出
机械安装和传感器操作
只要遵守zui大安装扭矩,pr.Bolt可以替代机械结构中的任何传统螺栓。这将使pr.Bolt能够量化通过螺 栓连接的轴向动态力。
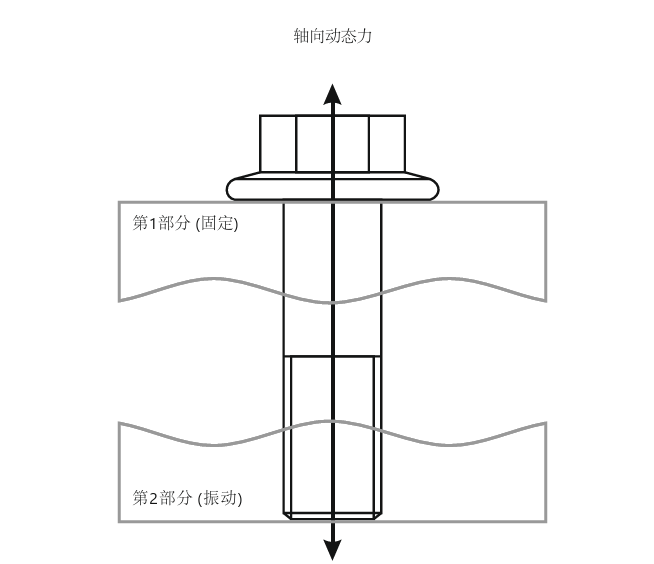
图2. pr.Bolt的机械安装和操作
pr.Bolt有一个集成在螺栓主体内的压电传感器。沿着螺栓轴线的动态力将导致在螺栓材料和压电传感 器中出现动态应变,这将转化为动态电荷。这个电荷居然后被调节器放大,输出一个模拟电压信号。 通过使用正确的校准数据,可以测量螺栓连接的轴向动态力。
信号调节器输出的正电压信号意味着螺 栓处于拉伸状态。负电压意味着它处于压缩状态。
力信号可用于振动监测或反馈回路中的主动力控制等应用。
pr.Bolt也可应用于测量隔离振动的橡胶元 件的振动传输。橡胶元件通常用于螺栓固定:一个固定部分和一个有振动源的部分。
因此,pr.Bolt能 够测量通过橡胶元件的轴向动态力。
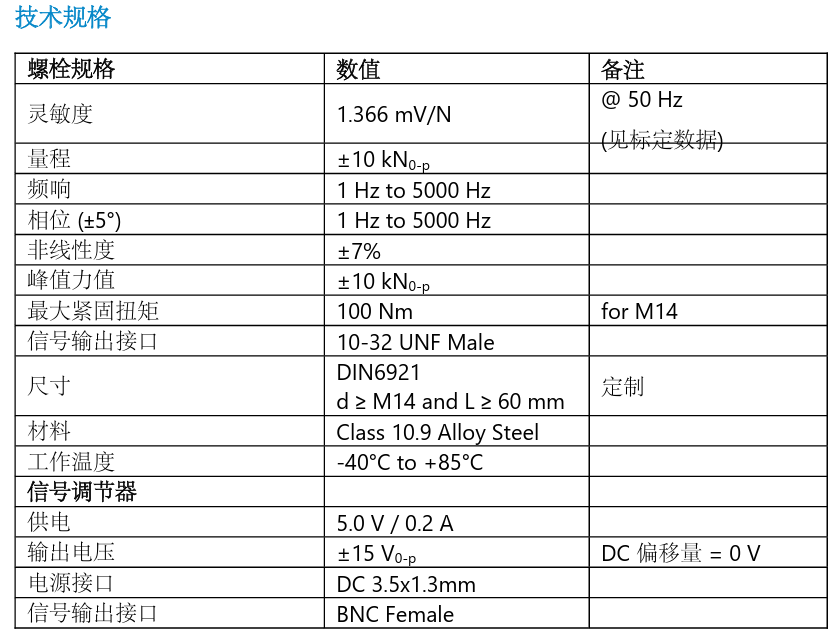
校准数据集 信号调节器产生的模拟电压信号取决于沿pr.Bolt的输入机械力 (波形、振幅、频率). 图3展示了与每个 pr.Bolt一起交付的典型校准频谱。当pr.Bolt被固定在一侧,并允许在另一侧振动时,灵敏度被测量。 使用的是在所有频率下振幅恒定的正弦波。
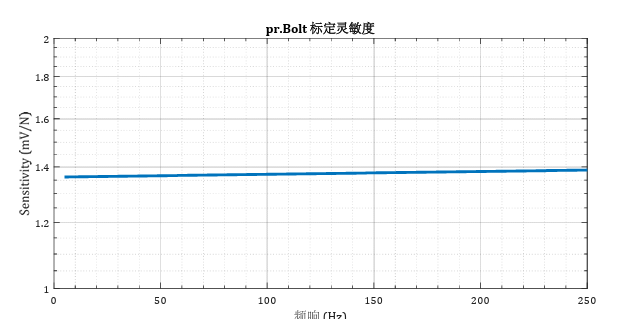
图3. 校准后的灵敏度
质量和测试
每个pr.Bolt都是单独测试的,包括频域灵敏度在内的校准数据随货发出。
版权所有 © 镇江嘉倍信息技术有限公司 未经许可 严禁复制 建议使用1024X768分辨率浏览本站
